








Traducir esta página:
¿Qué es la detección de bordes?

Generalmente, se denomina borde a una discontinuidad geométrica, por ejemplo, el comienzo o también una elevación brusca en un objeto.
En ciertos casos, es importante detectar la posición del borde de la forma más precisa posible. Esto se realiza con sensores de línea (modo de luz transmitida, modo de luz incidente - véanse también las series L-LAS-TB y/o L-LAS-RL) o con sistemas de cámaras 2D y/o 3D.
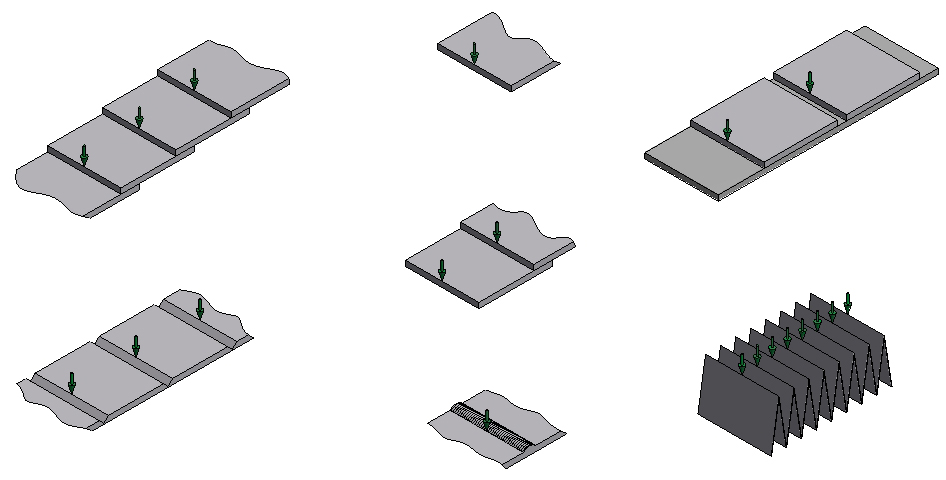
Si los bordes deben detectarse o contarse muy rápidamente, se utiliza entonces un principio completamente diferente, que también es muy adecuado para grandes variaciones de la distancia de los bordes al sensor. Como ejemplo se pueden citar los siguientes campos de aplicación:
- en la industria de la impresión (contador de copias, contador de imbricados)
- en la industria del metal (detección de marcas por vibraciones, de costuras de soldadura, de hojas superpuestas)
- en la industria del embalaje (recuento de embalaje plegado)
- en la industria del papel (recuento de hojas individuales)
- en la industria del plástico (recuento y detección de láminas)
- en la industria eléctrica (recuento de cables en bobinadoras)
- en la industria del automóvil (recuento de bordes de esteras de filtro de aire plegadas)
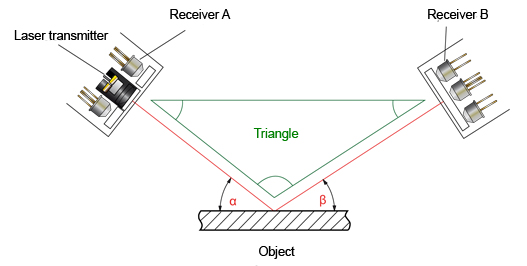
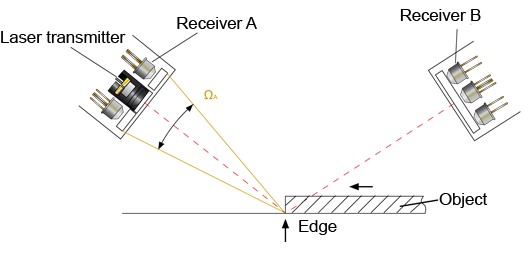
Detección de bordes por triangulación
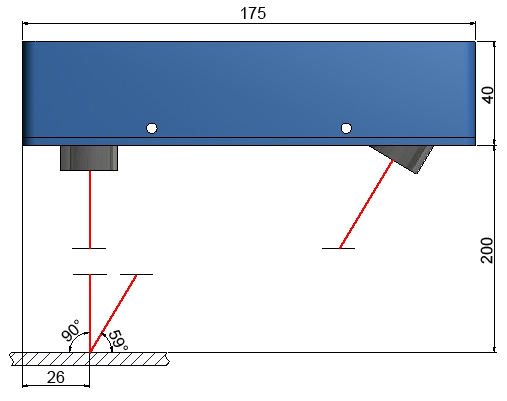
Transmisor, receptor y objeto conforman aquí un triángulo, al que además, de forma complementaria, del lado del transmisor hay un receptor adicional. En los detectores de bordes del sensor se utiliza un diodo láser enfocado, para que el spot láser en el punto de incidencia (objeto) sea tan pequeño como fuera posible. Desde este objeto, el punto de láser es dispersado directa o difusamente, pero también absorbido, dependiendo de la composición de la superficie del objeto.
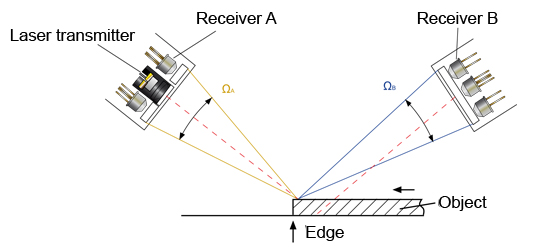
Una parte de la dispersión hacia adelante se transmite al receptor B (ángulo sólido SLB), mientras que una parte de la dispersión hacia atrás es capturada por el receptor A (ángulo sólido SLA). Dependiendo del ángulo se puede crear, aquí se forma un área de trabajo relativamente grande. Si se mira el valor de norma del receptor A (señal A) y del receptor B (señal B) se obtiene la siguiente relación:
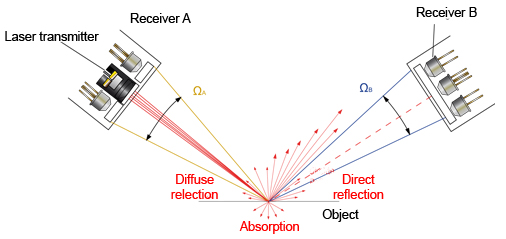
Usando el valor de norma se dispone de una magnitud de medida que en la práctica es casi independiente de las variaciones de la luminosidad y/o del color de la superficie del objeto en la práctica. ¿Qué sucede ahora con el valor de norma, cuando un borde se mueve hacia el spot láser?
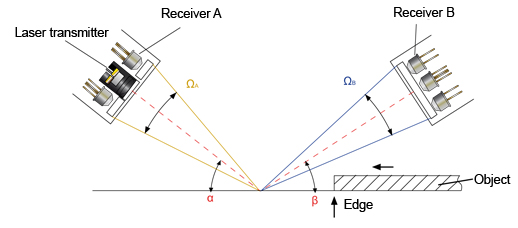
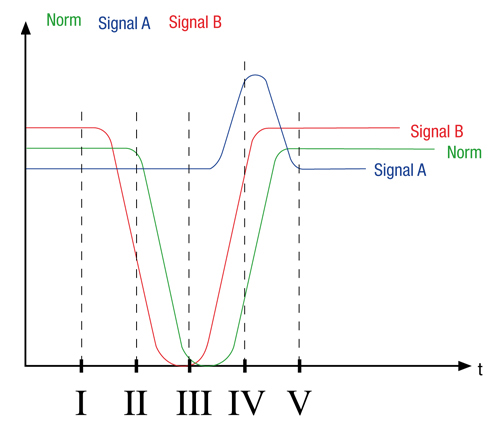
Ι:
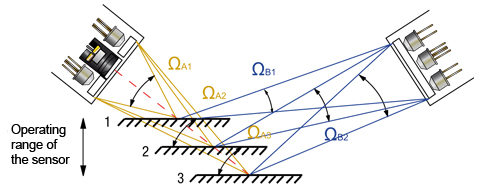
En este momento, el borde todavía está tan lejos del spot láser, que las áreas de captación SLB y SLA no se ven afectadas.
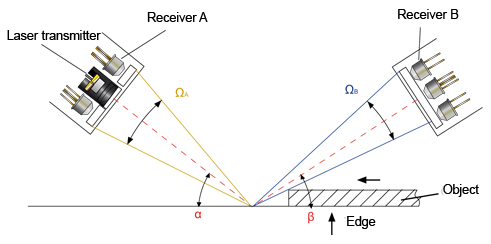
ΙΙ:
El objeto ahora corta el campo visual del receptor B. El área de captación láser ΩB se hace más pequeña, mientras ΩA se mantiene sin cambios, por lo tanto, el valor de norma se hace más pequeño, ya que la señal B se reduce, mientras que la señal A se mantiene sin cambios.
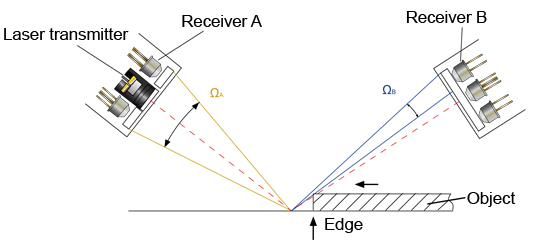
III
El borde del objeto corta ahora del campo visual ΩB campo visual en el spot láser, por lo tanto el valor de norma disminuye aún más. ΩA se mantiene sin cambios.
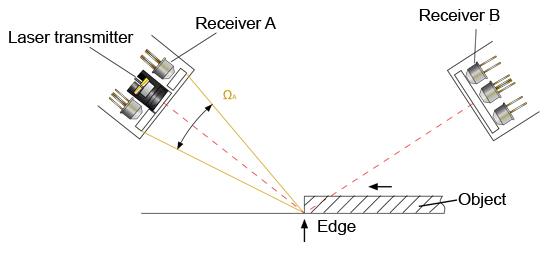
IV
El borde del objeto interrumpe por completo el contacto visual del receptor B en el spot láser. Por lo tanto, la señal B tiende a cero y la norma también alcanza un mínimo.
¡NORMA->Ø!
Además, la señal A del receptor A experimenta un ligero incremento, ya que por el borde del objeto, la luz dispersada hacia adelante se retrodispersa, y por lo tanto, incide parcialmente sobre el receptor A.
V
El borde del objeto ahora ha pasado el spot láser y ha restaurado el contacto visual entre el punto de láser y el receptor B. El valor de norma alcanza casi el mismo valor que en I.
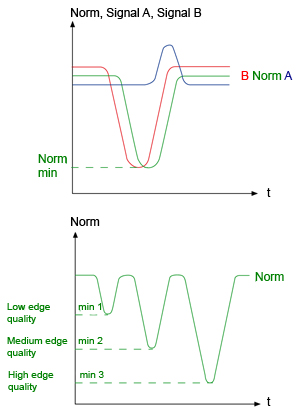
En la práctica, los bordes de los objetos por lo general no son tan pronunciados, de modo que el valor de norma no alcance Ø. El mínimo del valor de norma es una medida para la "calidad de los bordes", es decir, cuanto menor es el valor de norma, más pronunciado es el borde de un objeto. La calidad del borde está influenciada por la densidad del objeto y la pendiente del borde:
¡Ya que los detectores de bordes se utilizan sobre todo para contar objetos, cada borde puede emitir exactamente sólo una señal, de lo contrario, el recuento sería adulterado! Además de la segura detección de bordes, se han introducido tres medidas de protección adicionales:
1. Medida de protección HISTÉRESIS
En la práctica y por desgracia, los bordes en general difieren del ideal de marcados cambios escalonados, mas bien, el borde consiste de varios minibordes, los que a su vez pueden afectar el valor de norma.
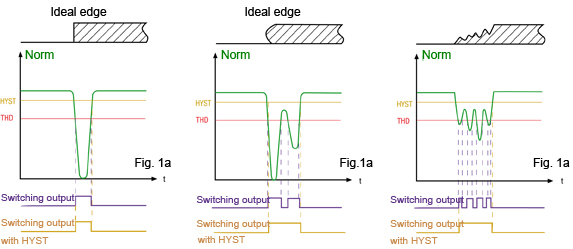
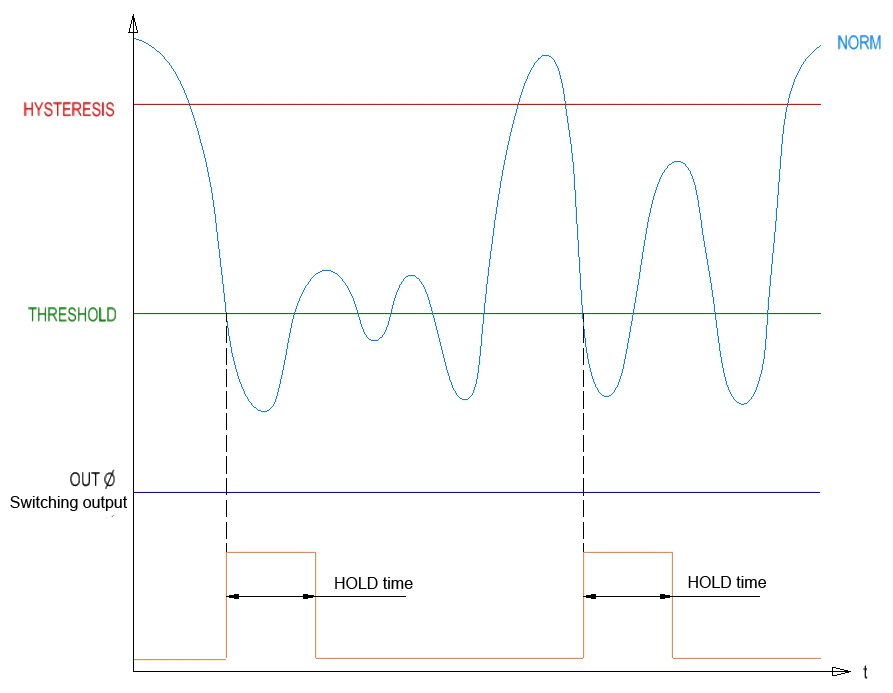
Normalmente, un borde es detectado por el controlador del sensor si el valor de norma está por debajo de un determinado umbral THD. Después de pasar por el umbral THD (de arriba hacia abajo), se produce un cambio de estado de conmutación en la salida del sensor. ¡Si se supera el umbral de nuevo (y no hubiera medidas de protección adicionales), la salida de conmutación vuelve, como se muestra en la ilustración 1a, a su estado inicial!
Sin embargo, si se contemplan las ilustraciones 1B y 1C, puede verse que el umbral de conmutación de cada borde es atravesado varias veces, y por lo tanto activaría varios pulsos.
Con la ayuda de un segundo umbral HYST, ahora se suprimieron estos pulsos múltiples, la operación de conmutación todavía se activa traspasando (cae por debajo) el umbral THD. ¡Para que pueda ser emitido un pulso más, debe sobrepasarse el umbral de histéresis HYST (véanse las ilustraciones 1b, 1c: salida de conmutación con HYST)!
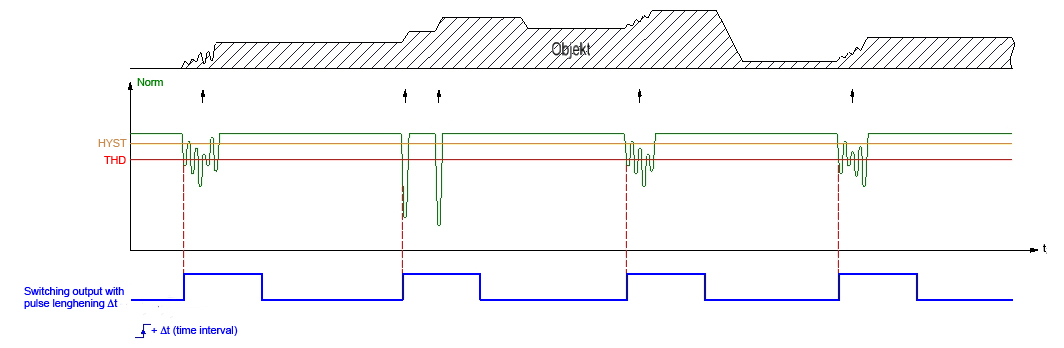
2. Medida de protección EXTENSIÓN DE PULSO
Otra medida de protección es extender la salida de conmutación, después que se haya realizado el proceso de conmutación (caída por debajo del umbral THD), por un intervalo de tiempo concreto definible (por ejemplo., 1 ms, 2 ms, 5 ms, 10 ms).
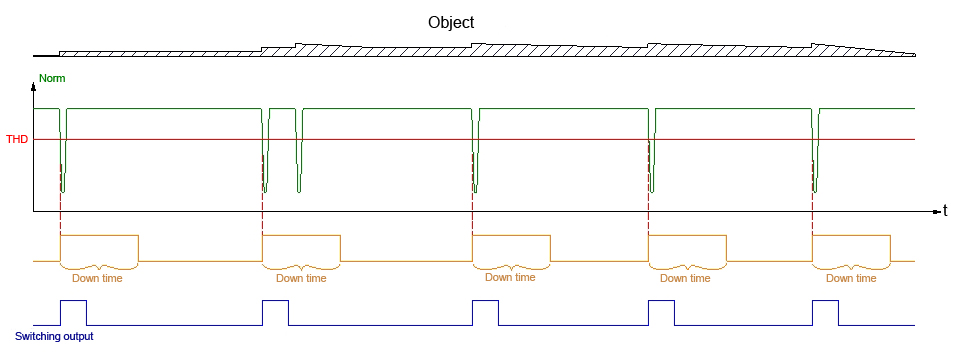
3. Medida de protección TIEMPO MUERTO
La medida de protección tiempo muerto sería la más importante. El término tiempo muerto se introdujo porque la evaluación más o menos "se calma" durante un cierto tiempo, esto es, durante este período no hay evaluación.
El tiempo muerto se activa después haber caído por debajo del umbral de conmutación THD. La duración del tiempo muerto se determina en el modo ABSOLUTE por el período de tiempo especificado y en el modo RELATIVE por la secuencia temporal de los bordes precedentes. Se puede seleccionar un valor porcentual de la distancia temporal actual de bordes.
Basic design of an edge detector
Estructura básica de un detector de bordes
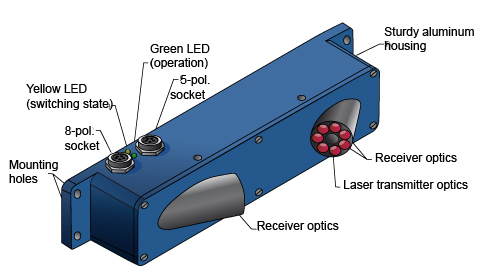
Los detectores de bordes de la empresa Sensors Instruments tienen un diodo láser modulado. Con la ayuda de un lente, la luz láser se enfoca de modo que tal que en la distancia del objeto se dispone de un spot de láser de alrededor de 20 µm bis 100 µm:
¡A causa de los láser ya probados y del filtro de interferencia usado del lado receptor, este tipo de sensor es extremadamente insensible a la luz externa! Los sensores de bordes se parametrizan a través de una interfaz RS-232 con una interfaz de usuario de Windows®. Por medio de esta interfaz de usuario, se puede obtener un ajuste óptimo y una representación gráfica de los los valores actuales de norma (normas mínimas).
En la salida se dispone de una señal digital que puede ser evaluada directamente, por ejemplo, por un PLC, la operación de conmutación también se muestra en el LED amarillo integrado.
Hardware de la detección de bordes
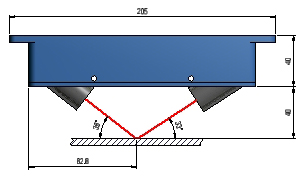
LCC-30 y LCC-30-MA
| Este tipo es apto principalmente para el recuento de hojas sueltas de colores, desde alto brillo a mate, en forma imbricada (conteo seguro, por ejemplo, de hojas laminadas de alto brillo). El área de trabajo es en este caso de 26 mm a 34 mm. La versión MA permite regular algunos parámetros, tales como el tiempo muerto y la duración del pulso y la sensibilidad por medio del interruptor integrado en el sensor. | 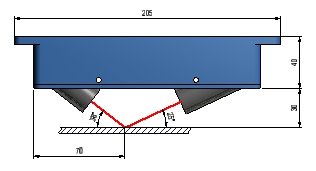 |
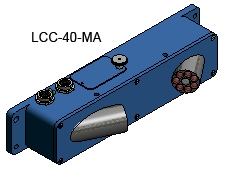
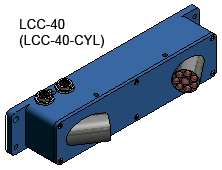
LCC-40, LCC-40-MA y LCC-40-CYL
El LCC-40 y el LCC-40-MA se utilizan principalmente en aplicaciones en las que predominan los bordes extremadamente pequeños. El sensor puede, por ejemplo, trabajar fácilmente hojas sueltas homogéneas con un espesor de 40 g/m2, incluso a alta velocidad (varios m/s) de forma imbricada.
El LCC-40 y el LCC-40-MA se utilizan principalmente en aplicaciones en las que predominan los bordes extremadamente pequeños. El sensor puede, por ejemplo, trabajar fácilmente hojas sueltas homogéneas con un espesor de 40 g/m2, incluso a alta velocidad (varios m/s) de forma imbricada.
Además, el sensor también es excelente para la detección de láminas de plástico (incluso transparentes) en forma imbricada. Con este tipo, también se puede detectar de forma segura el lugar de solapamiento de colores metálicos finos. El área de trabajo es aquí 35 mm a 45 mm. También aquí, la versión MA permite un ajuste del tiempo muerto, así como también de la sensibilidad y del pulso, directamente en el sensor.
|
La versión LCC-40-CYL cuenta con un haz de rayo láser en forma de línea (a 40 mm de separación, alrededor de 3 mm x 0.1 mm). Con él se pueden compensar mejor eventuales defectos en el objeto. Este tipo también se usa para la detección de marcas de vibraciones (muescas lineales) en tiras bimetálicas.
|
 |
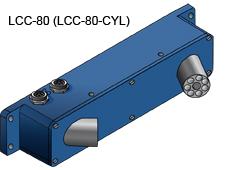
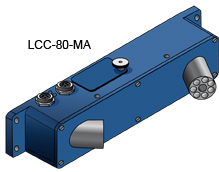
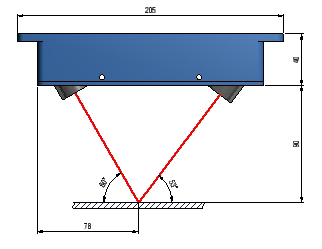
| El detectores de bordes LCC-80 y/o LCC-80-MA se utilizan, por ejemplo, como contadores de copias de apiladores. Además, estos tipos también se utilizan para la detección de costuras de soldaduras en chapas o tuberías utilizadas. El rango de trabajo del sensor es entre 60 mm y 100 mm. Con el tipo MA se ajustan el tiempo muerto, el tiempo de retención de salida de conmutación (tiempo de pulso) por medio de conmutador rotativo y DIP directamente en el sensor. |  |
| La versión CYL tiene un haz de rayo láser en forma de línea, que en una separación de 80 mm tiene un tamaño de 3 mm x 0,1 mm en 80 mm de separación de aproximadamente 3 mm, con el que se puede compensar cualquier discontinuidad o rugosidad de la superficie del producto. | |
|
Debido al gran rango de trabajo, este tipo de sensor es especialmente adecuado para flujos imbricados con fuertes fluctuaciones de distancia al sensor y/o para la detección de soldaduras en tubos o chapas con muy variable distancia al detector de bordes.
Además, este tipo de sensor se puede utilizar también idealmente para el recuento de embalaje plegado. Se puede utilizar este tipo de sensor de forma ideal para el recuento de embalaje plegado.
|
 |
|
También el sensor, en conexión con dos iniciadores, es excelente para el recuento de copias impresas en transporte elevado (modo de trigger externo).
|
|
|
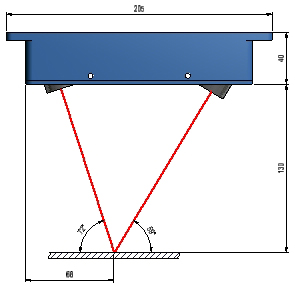
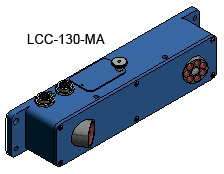
Con un rango de trabajo de 80 mm a 160 mm, este tipo se utiliza principalmente donde se monta el producto a ser contado, como por ejemplo, como es el caso del embalaje de cajas de cartón plegadas.
|
 |

|
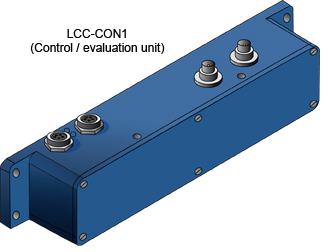
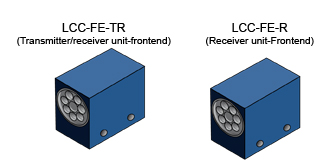
En esta versión se separó la propia parte de sensor (frontend) de la electrónica de control. Como resultado, se dispone de versiones de un detector de bordes ajustables y extremadamente flexibles .
|
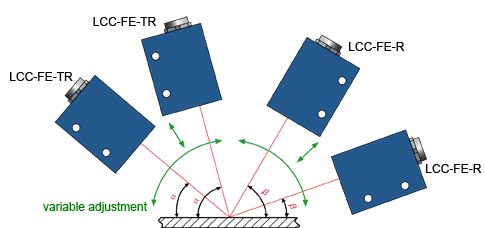 |
El sensor cautiva por su amplio rango de trabajo, que se extiende desde 150 mm a 250 mm.
Además, hay una versión (LBC-200) que, aparte de la salida digital, dispone de una salida analógica (0 ... + 10V), con lo cual el dispositivo puede utilizarse, por ejemplo, para medir la frecuencia de las paletas del rotor en turbocompresores o ventiladores.
Resumen del hardware
¿Dónde es más apropiado cada tipo?
|
|
LCC-30 |
|
|
| LCC-40 | |
|
|
| LCC-80 | |
|
|
| LCC-90 | |
|
|
| LCC-130 | |
|
|
| LCC-200, LBL-200 | |
|
|
| LCC-CON1 + LCC-FE-TR + LCC-FE-R | |
|
|
| FIO-80 | |
|
|
Software de detección de bordes
Software Windows® SI-LCC-Scope V1.0
Mediante la interfaz de usuario de PC, se permite una confortable parametrización de los sensores LCC. Los sensores LCC se conectan con el PC por medio del cable de interfaz para la interfaz serial (Bus RS232 o bus USB). Después de haber realizado la parametrización, el detector de bordes puede separarse del PC nuevamente.
PMOD + POWER [%]: aquí se ajusta la potencia del láser y/o el modo de potencia del láser. En el modo DYN, se activa el control de potencia de luz. El software determina la cantidad óptima de luz; en el modo FIX se puede introducir la potencia de luz láser por medio del casillero POWER [%].
HOLD [ms]: Permite la introducción de la duración del impulso de salida después de detectar un borde.
Si el valor de la norma cae por debajo del valor THRESHOLD, se activa la salida de conmutación y, al mismo tiempo, se desactiva la detección de bordes hasta que se traspase el umbral de histéresis (HYTERESIS).
THRESHOLD
Por medio de este casillero se puede ajustar la sensibilidad del detector de bordes. El sensor se vuelve insensible cuando el umbral se desplaza hacia abajo.
HYSTERESIS
Para evitar la conmutación múltiple después de la detección de borde, se incorpora un segundo umbral. El sensor se activa de nuevo tras haber superado ese umbral.
Para evitar la conmutación múltiple después de la detección de borde, se incorpora un segundo umbral. El sensor se activa de nuevo tras haber superado ese umbral.
TRIGGER: ADJ EXT (disparador)
Para facilitar la búsqueda de una posición adecuada del disparador, se incorporó al software operativo Windows® un diagrama especial, que se puede abrir con
SOURCE: EXT
En este diagrama se muestra la posición actual de las dos señales de entrada trigger ING e INØ, así como también la posición actual del borde. INØ está entonces en Ø y la posterior carrera INØ, en 100%. IN1 debe estar aproximadamente en 60%, el borde en aproximadamente a medio camino entre INO y IN1, es decir, en alrededor de 30%.
BACKLIM:
Aquí se puede definir un límite de intensidad, por debajo del cual se interrumpe la detección de bordes (DATØ=señal del receptor A, también ver "detección de bordes después modo de triangulación")
TRIGGER
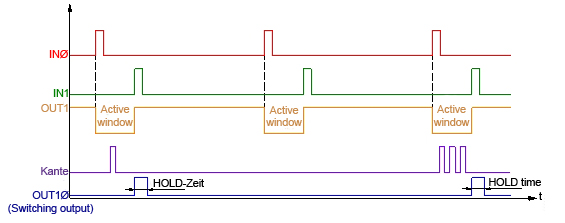
En TRIGGER = CONT se efectúa una medición continua. Si el trigger está en EXT, sin embargo, por ambas salidas digitales INØ y IN1 se determina una ventana activa y sólo durante este período activo se lleva a cabo la detección de bordes.
Si durante el período activo se detectan uno o más bordes, la salida digital se activa después de finalizar el período activo de la salida de conmutación con un HOLD [ms] de tiempo prefijado, con lo cual se pueden evitar conteos múltiples durante un intervalo de trigger (VENTANA ACTIVA).
REG CNT
Este ajuste afecta a la velocidad de control de potencia láser.
AVERAGE
Aquí se pueden promediar varios valores norma.
OUTMODE
Si se selecciona DIRECT, cambia el estado de conmutación, después de la detección del borde, de LOW (0 V) a HIGH (+ 24V) y después del período HOLD disminuye hasta volver al estado inicial. En INVERSE, por el contrario, cambia el estado de conmutación, después de la detección del borde, de HIGH (+ 24V) a LOW (0V) y y después del período HOLD disminuye hasta volver al estado inicial.
DT MODE
El modo de tiempo muerto (DEAD TIME MODE) indica con qué tiempo muerto se trabaja (ver también precauciones : el llamado tiempo muerto en "¿Qué es la detección de bordes?"). Durante este período, no se realiza la detección de bordes.
Con FIX se trabaja con tiempo muerto fijo. El tiempo muerto se establece en milisegundos con DEAD TIME [ms]. Con DYN, se trabaja con tiempo muerto dinámico y la entrada se hace en DEAD TIME [%].
El tiempo entre dos bordes detectados se valora con 100%. Dependiendo del valor seleccionado del tiempo muerto, se debe esperar este valor porcentual hasta que la detección de bordes se active nuevamente.
SOURCE
RAW + las señales del receptor A (DATØ) y B (DAT1) se visualizan en la interfaz gráfica. Además, los datos se muestran numéricamente junto con el valor de norma.

Después de hacer clic en GETBUFF, se muestran los últimos 16 valores mínimos de la señal de norma (borde valor mínimo) según el borde detectado.
Además, en el gráfico se muestra el umbral THRESHOLD, que se traspasa por debajo.
Después de detectado el borde, el software del sensor, durante los tiempos muerto y hold, empieza a buscar y mantener el valor más pequeño de norma (minimum).
Con la ayuda de GETBUFF, por lo tanto, se puede ajustar óptimamente el umbral de sensibilidad (THRESHOLD) para cada aplicación, lo que facilita en gran medida el ajuste del sensor.
{kind=link}